rusEFI project¶
Advanced¶
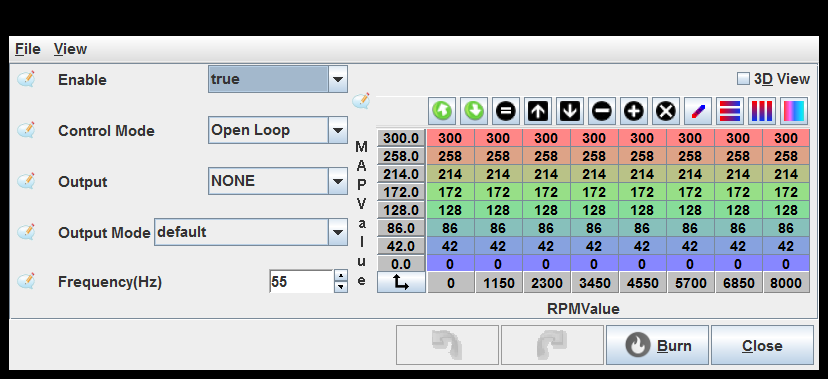
Boost Control¶
General Purpose PWM 1¶
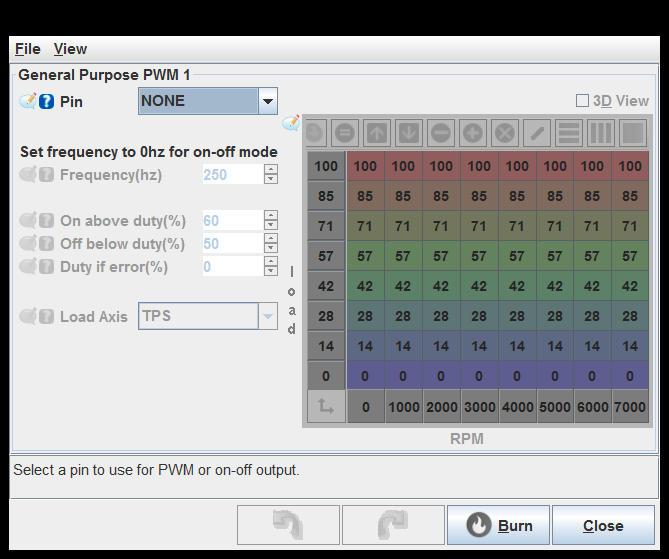
Pin: This implementation produces one pulse per engine cycle. See also dizzySparkOutputPin.
On above duty(%): In on-off mode, turn the output on when the table value is above this duty.
Off below duty(%): In on-off mode, turn the output off when the table value is below this duty.
Duty if error(%): If an error (with a sensor, etc) is detected, this value is used instead of reading from the table. This should be a safe value for whatever hardware is connected to prevent damage.
Load Axis: Selects the load axis to use for the table.
General Purpose PWM 2¶
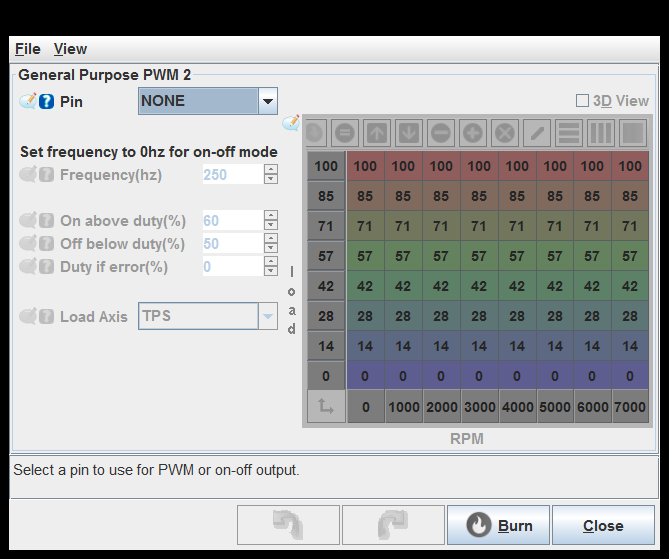
Pin: This implementation produces one pulse per engine cycle. See also dizzySparkOutputPin.
On above duty(%): In on-off mode, turn the output on when the table value is above this duty.
Off below duty(%): In on-off mode, turn the output off when the table value is below this duty.
Duty if error(%): If an error (with a sensor, etc) is detected, this value is used instead of reading from the table. This should be a safe value for whatever hardware is connected to prevent damage.
Load Axis: Selects the load axis to use for the table.
General Purpose PWM 3¶

Pin: This implementation produces one pulse per engine cycle. See also dizzySparkOutputPin.
On above duty(%): In on-off mode, turn the output on when the table value is above this duty.
Off below duty(%): In on-off mode, turn the output off when the table value is below this duty.
Duty if error(%): If an error (with a sensor, etc) is detected, this value is used instead of reading from the table. This should be a safe value for whatever hardware is connected to prevent damage.
Load Axis: Selects the load axis to use for the table.
General Purpose PWM 4¶
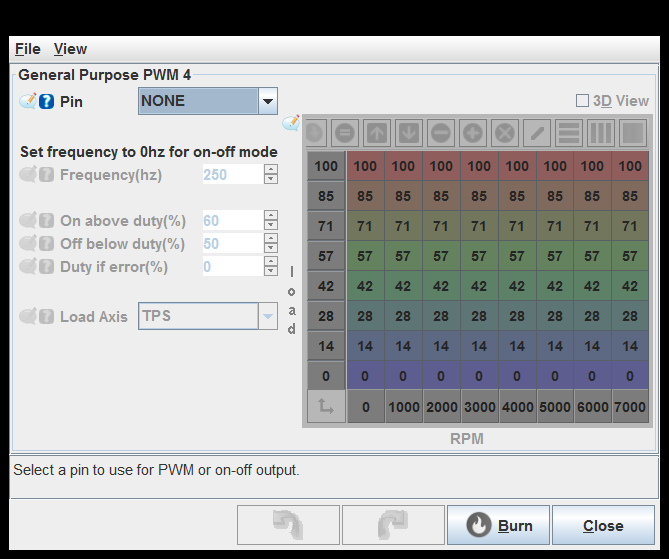
Pin: This implementation produces one pulse per engine cycle. See also dizzySparkOutputPin.
On above duty(%): In on-off mode, turn the output on when the table value is above this duty.
Off below duty(%): In on-off mode, turn the output off when the table value is below this duty.
Duty if error(%): If an error (with a sensor, etc) is detected, this value is used instead of reading from the table. This should be a safe value for whatever hardware is connected to prevent damage.
Load Axis: Selects the load axis to use for the table.
FSIO inputs¶

Aux PID¶
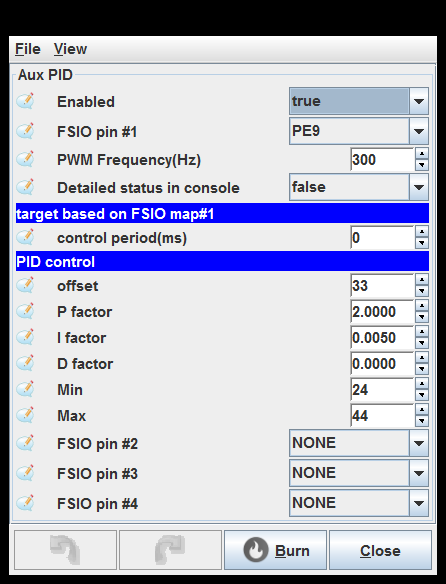
Detailed status in console: Print details into rusEfi console
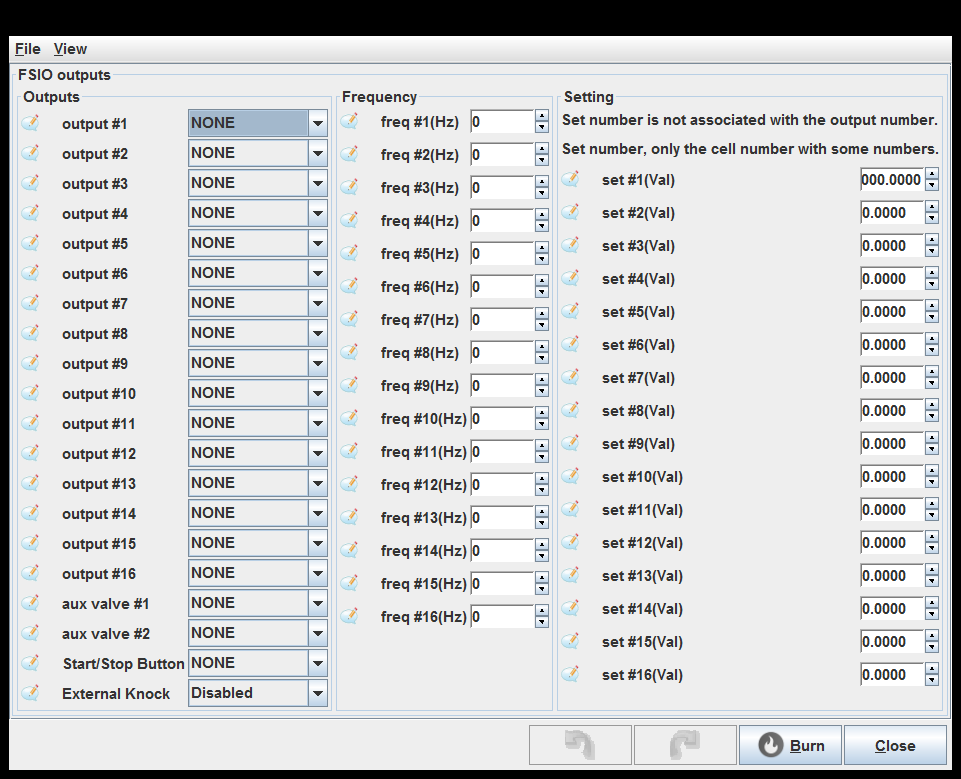
FSIO outputs¶
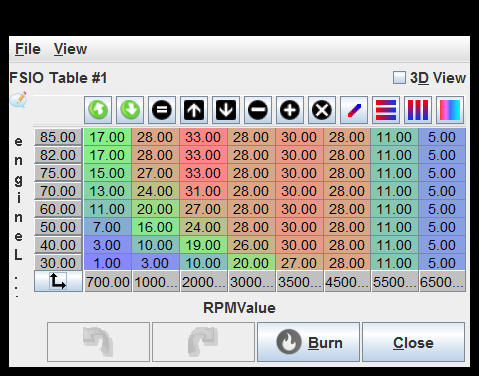
FSIO Table #1¶
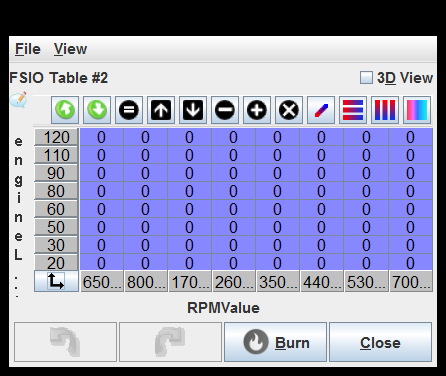
FSIO Table #2¶
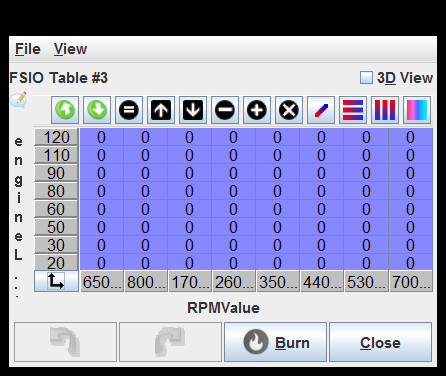
FSIO Table #3¶
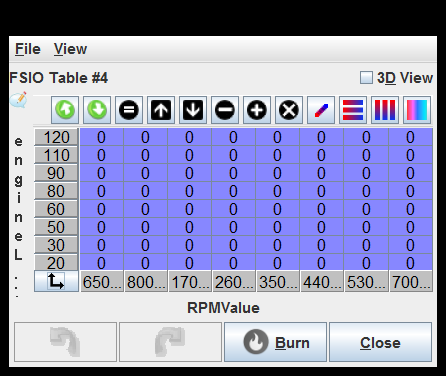
FSIO Table #4¶
FSIO Formulas¶
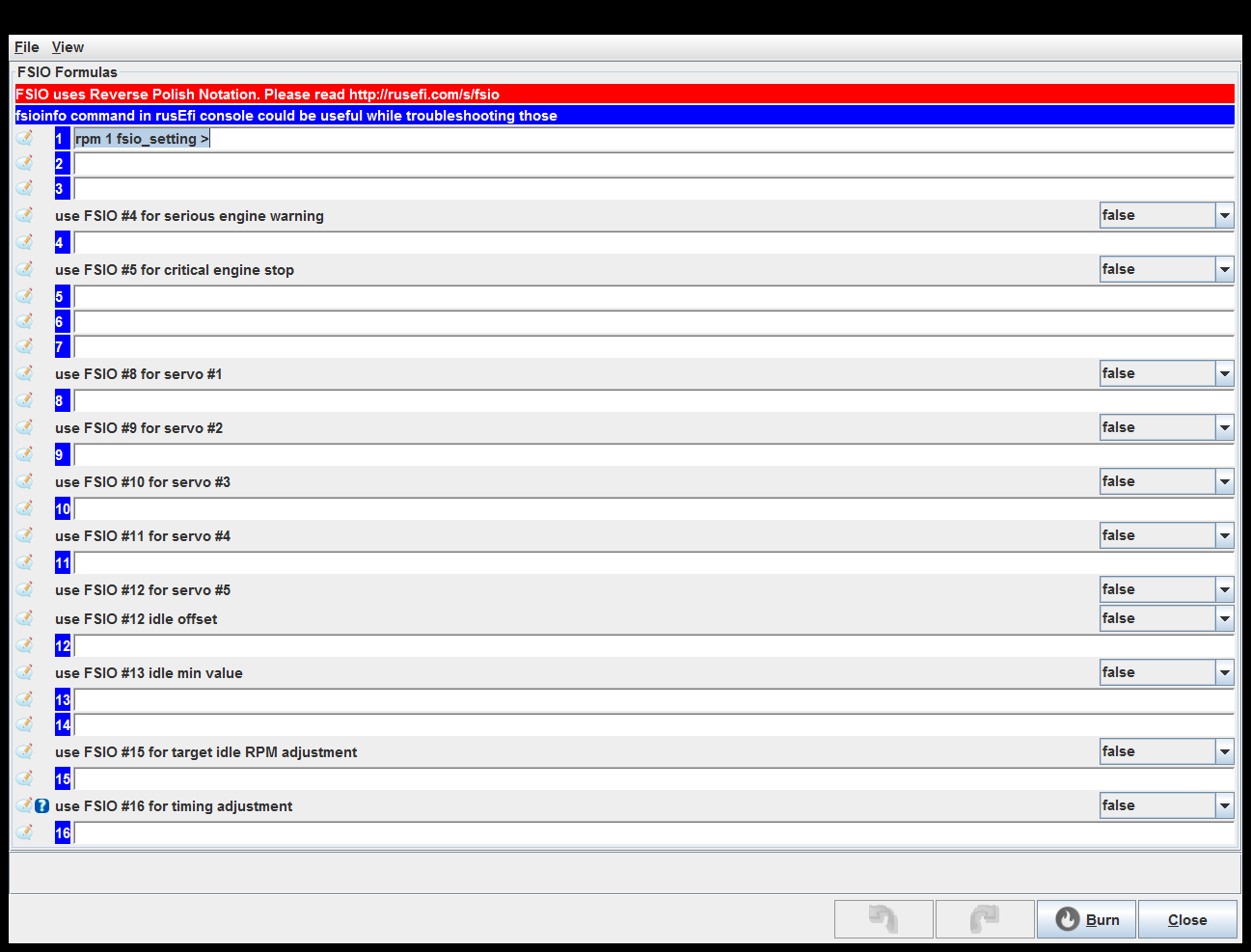
use FSIO #16 for timing adjustment: See fsioTimingAdjustment
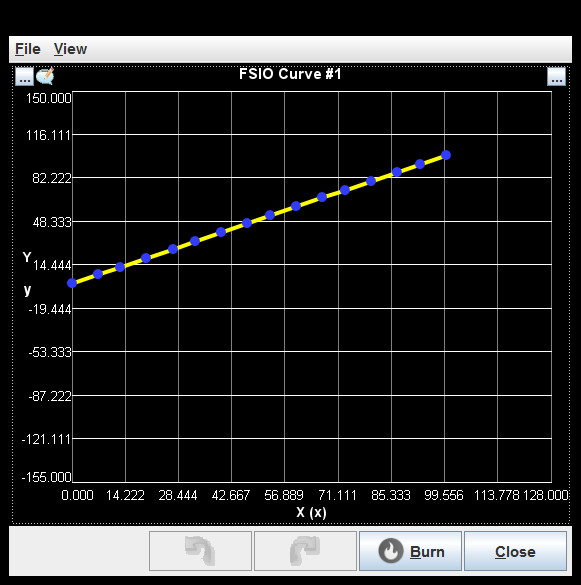
FSIO Curve #1¶
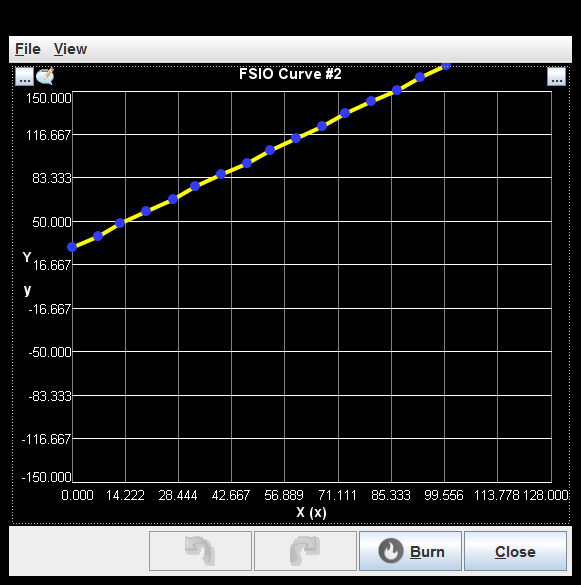
FSIO Curve #2¶
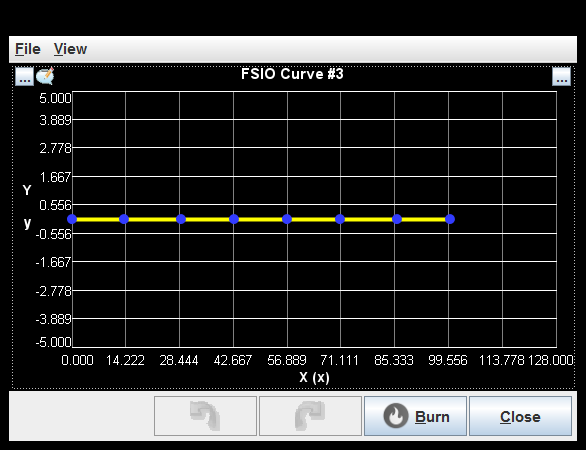
FSIO Curve #3¶
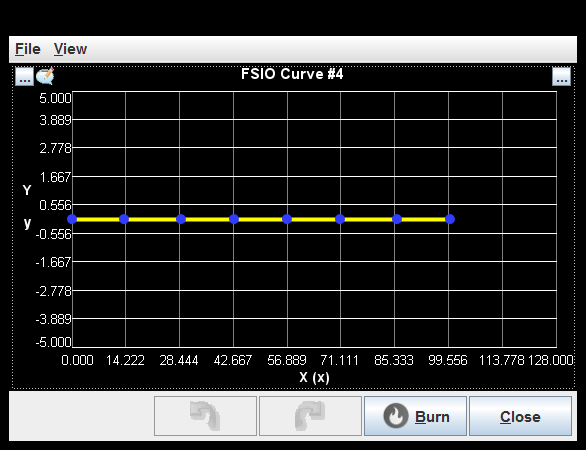
FSIO Curve #4¶
generated by class com.rusefi.MdGenerator on Fri May 01 15:24:28 EDT 2020