rusEFI Wideband Controller¶
NOTE: This is currently under development. This page might be wrong or change quickly.
FAQ¶
Q: dim red LED?¶
A: We only preheat mildly until engine is running for reasons TBD.
Q: Why would you need CAN for rusEFI WBO?¶
A: We control heater based on RPM, also WBO compensate for battery voltage based on CAN info.
Pinout¶
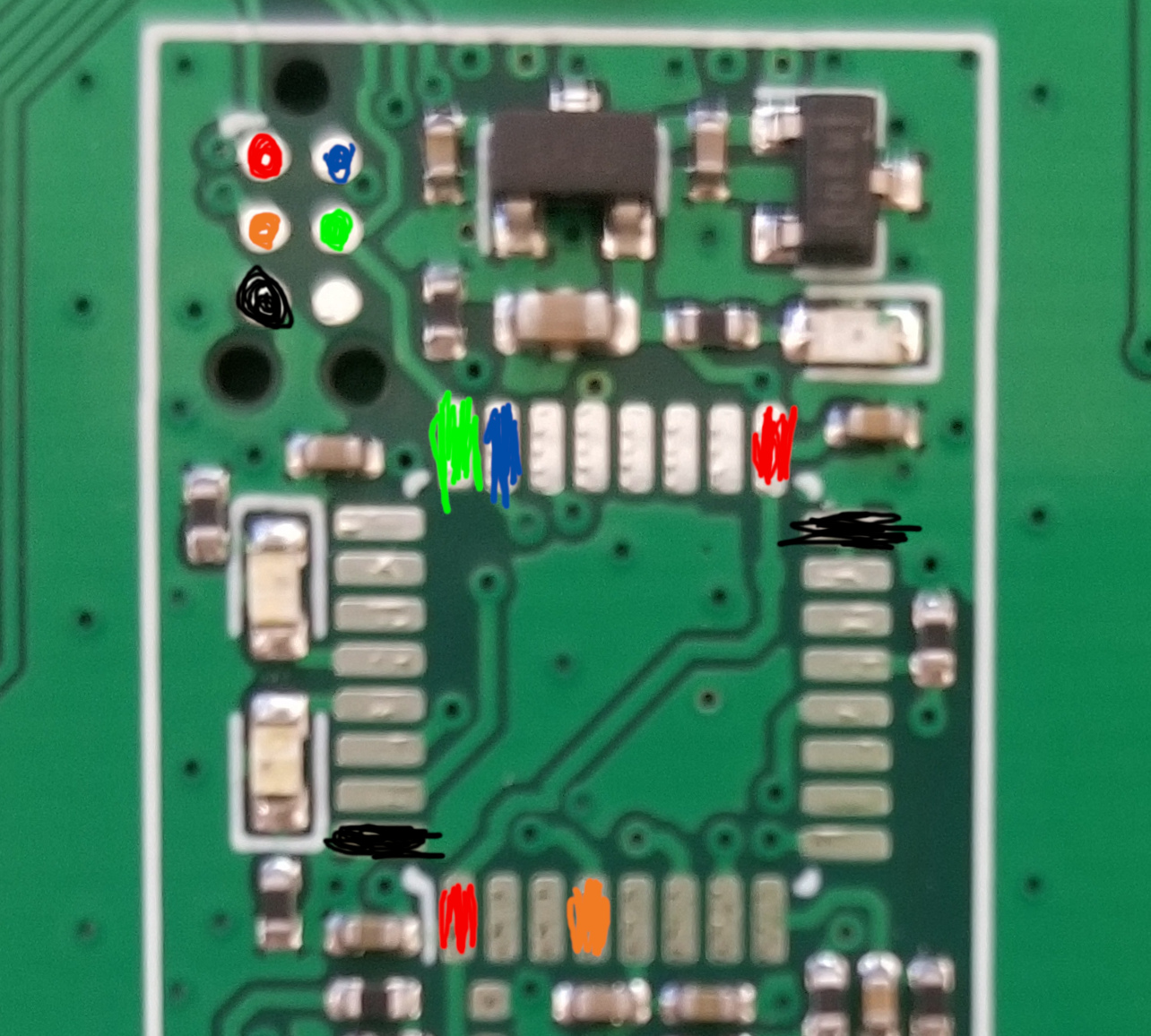
F042 module pinout
| Pin Number | Function | Notes |
|---|---|---|
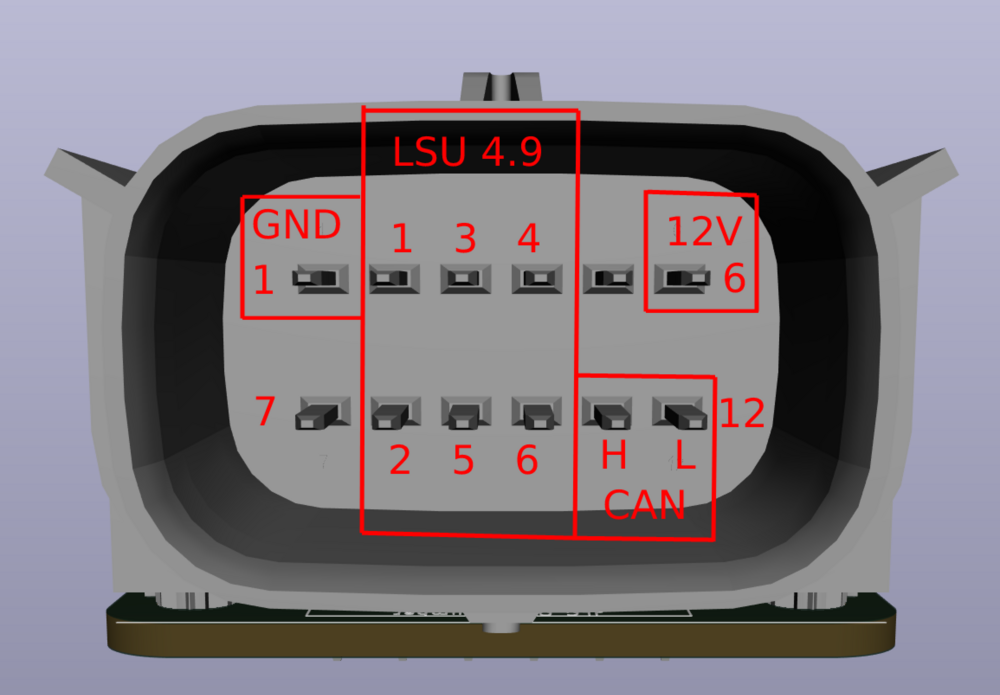
| 1 | Ground | Connect to chassis ground |
| 2 | LSU Ip | Connect to sensor pin 1 |
| 3 | LSU Heater - | Connect to sensor pin 3 |
| 4 | LSU Heater + | Connect to sensor pin 4 |
| 5 | No connection | |
| 6 | 12v Supply | Connect to fuel pump supply or independent relay controlled by ECU |
| 7 | No connection | |
| 8 | LSU Vm | Connect to sensor pin 2 |
| 9 | LSU Rtrim | Connect to sensor pin 5 |
| 10 | LSU Un | Connect to sensor pin 6 |
| 11 | CAN H | CAN bus high |
| 12 | CAN L | CAN bus low |
LED decoding¶
| Blue LED | Green LED | Meaning |
|---|---|---|
| off | fast flash | sensor warming up |
| off | slow flash | Sensor hot, operating normally |
| flashing | off | See error code table below |
| alternating | alternating | Bootloader, see below |
Firmware Update¶
rusEFI own wideband module requires one time initial programming. Self contained version of the board relies on custom USB header while module integrated into Hellen requires usage of ST-Link programmer hardware via TC2030 or breakout SWD pins.
initial programming binary at https://github.com/mck1117/wideband/tree/master/for_rusefi
At the moment only known to work using stm32cube software not ST Link utility (weird). In case of Hellen 5v via USB is required.
Error Codes¶
Green LED off and blue LED flashing indicates an error. The blue LED will blink a certain number of times, with a 2 second pause, then repeats.
| Blinks | Meaning |
|---|---|
| 3 | Sensor failed to heat up within 30 seconds |
| 4 | Sensor overheated after entering closed loop mode |
| 5 | Sensor unexpectedly cold after entering closed loop mode (bad wiring?) |
Bootloader LED Codes¶
| Blink pattern | Meaning |
|---|---|
| alternating slowly | Firmware integrity check failed, please retry firmware upgrade. |
| alternating quickly | Waiting for bootloader entry command, only occurs for ~1 second before launching firmware |
Setting it up in Tunerstudio¶
In order for the WBO to work, the following conditions (and maybe more) have to be met:
- Under "Controller" -> "Can Bus Communication" -> "Enable rusEFI Can Broadcast" = "true" must be set
- Under "Sensors" -> "EGO Sensor" -> "Enable Can Wideband" = "true" must be set
There was also an opinion voiced that the board needs to see voltage on the "vBatt ADC Input" pin. This is as yet unconfirmed.
Source Code¶
The hardware and software source code are hosted here.
Index Selection¶
https://github.com/mck1117/wideband/issues/11
Fabrication¶
- Power board with 5v (WBO module produces it's own 3v from supplied 5v)
- Tag-Connect-TC2030 to upload firmware
- power cycle to confirm green LED blinking